
仮想現実感と力覚
執筆:准教授 神原利彦
一般的に、仮想現実感(Virtural Reality:以下VRと略)といえば、コンピュータ・グラフィックス(以下CGと略)などを使って構築した(現実には存在しない)仮想世界をあたかも現実であるかのように、人間の「視覚」に感じさせる技術だと思われているようだ。現に、ゴーグル状のHMD(ヘッド・マウント・ディスプレイ)を頭から被って、両目の眼前に小型のLCD(液晶ディスプレイ)を設置して、そこにCGの映像を写し出すことで仮想世界を視ることがVRだと思われている感がある。だが、「視覚」だけでなく「力覚」を感じさせるVRもある。今回は、その「力覚」を使ったVRについて紹介する。
力覚というのは、向きと強さを持つ「力」と、ある軸を中心に物体を回そうとする「モーメント(回転力)」の2種類があり、これらはたいてい同時発生する。このような力覚を人工的に発生させるための装置は、力覚デバイス(Haptic Device)と呼ばれている。その代表的なものが図1に示したSensable社製Phantom OMNIである。ペン状のスタイラスを握った人間が3次元的にペン先を自由に動かすことができるのだが、スタイラスには複数のリンクが連結されており、その各関節部分にサーボモーターが搭載されている。そして、そのサーボモーターをうまく制御することで、スタイラスを握った人間に擬似的な力(力覚)を感じさせることができる。

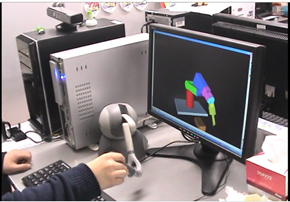
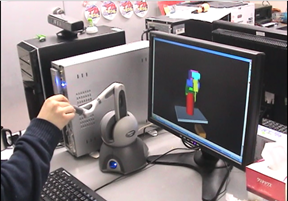
筆者の研究では、この力覚デバイスを用いて、バーチャルな彫刻を行うシステムの提案をしている。その実験の様子を図2に示す。操作者がスタイラスペンを握り動かすと、そのスタイラス先端の位置を検出し、その3次元位置へロボットアーム先端の刃物を動かす実験である。図2左右からも、CGロボットアーム先端の刃物が操作者の意図した場所へと連動していることがわかる。
さらに、このCGロボットアームを使って彫刻を行っている実験例を図3に示す。この図は令和2年度の本学の学生要覧の表紙の図でもある。多数積まれた半透明の細かい立方体が「ボクセル」と呼ばれるもので、これが彫刻で削り出される材料である。この材料の中には、黄色いウサギのポリゴン像が埋め込まれており、ボクセルが半透明なので、それが透けて見えるようになっている。
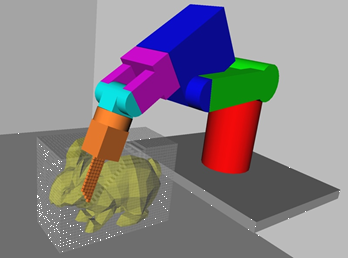
彫刻する人物(スタイラスの操作者)は、この黄色いウサギの像をお手本として、そのお手本を削らないように、その外側のボクセル「だけ」を刃物で削って(消して)いくことで、彫刻の素人でも、ウサギの像が彫れるように工夫している。操作者はスタイラスを操作して刃物を動かすのだが、刃物が材料を切り裂く際にかかる反力がスタイラスペンにかかり、操作している人がその反力を感じることができる。実際の彫刻であれば、刃物で手を切り負傷する事故も起こり得るが、この仮想空間におけるシステムでは、安全に彫刻の習熟が出来る。
「反力」とは、静止している物体を押すとその物体がその場にとどまり続けようとして、押し返してくる力のことである。物体を切る場合には、刃が物体を押し、切られまいとして物体が刃を押し返す力のことを指す。切れ味の良い刃物であれば、ほとんど反力が発生せずに切る作業が完了するが、切れ味が悪いと反力が大きくて、なかなか刃物が先に進まないだけでなく、反力を上回るだけのもっと大きな推進力を刃物に加えねば刃が先に進まない。これらの力は「目に見えない」ことが重要である。例えば、「ある人が刃物で何かを切る動画」を見ているとする。その人がどれだけの力で刃物を動かし、物体からどれだけの反力を感じているかを、動画を見ている人が知る事はできない。力は目に見えないものだし、動画にも力が写ってないからである。ごく当たり前のことだが、力は触ってみないと感じることができない感覚なのだ。
力覚センサは、刃物にかかっている力の大小を計測する装置である。目に見えないのならば、可視化すれば良いという理屈で、刃物に力覚センサを取り付けて物体を切る際に、物体から受ける反力を計測して、それをCGなどで、可視化して表示している研究例も存在する。図4に力覚センサの例を示す。青い部分が力覚センサであり、刃先と握り部を付けて実機ロボットがアーム先端のグリッパーで握れるようにしている。実機ロボットならばこれで計測すれば良いが、図3に示したような仮想世界のCGロボットアームならば実在してないので計測はできず、実機を参考に物理計算するしかない。筆者の手法では、刃物とボクセルの距離に反比例した反力がかかるという単純な物理モデルで擬似的な力を算出し、それを力覚デバイスで発生させているが、実機ロボットアームの関節のモーターの駆動トルクやリンク機構のイナーシャなどの慣性データを組み入れた物理計算をしなければ、実機とかけ離れた(非現実的な)力になってしまうだろう。

VRの分野では、日本バーチャルリアリティ学会(以下VR学会と略)という学会が存在し、このような力覚の研究をされておられる研究者が多数の成果を報告している。コロナ禍のため、今年もVR学会はオンライン開催を強いられているようだ。そこで、気づいたのだが、視覚を扱うVRの研究はその成果をディスプレイさえあればオンラインで伝達できるが、力覚を扱うVRの研究は、その成果をオンラインでは伝達できない。PCに必ず(視覚へ提示する)ディスプレイは付いているが、PCに普通、(力覚へ提示する)力覚デバイスは付いてないからだ。PCを買っただけでは、力覚を感じる事はできない。いくら言葉で「こんな力が発生してますよ」と説明しても、その力を学会講演を聞いてる(動画を見ている)聴衆が感じられないのであれば、伝わった事にならないだろう。改めて「力は目に見えない」ことを思い知る事態であった。
コロナ禍で、接触の機会が制限された代わりにIT産業が活性化し、Web会議などで、ネットワーク経由で「視覚」と「聴覚」は当たり前のように伝達し合えるようになったのだから、将来はなんとか「力覚」が伝達できるようになって欲しいと願う。
